

消防机器人运动机构
更新:2021-07-14 02:59:44 点击:
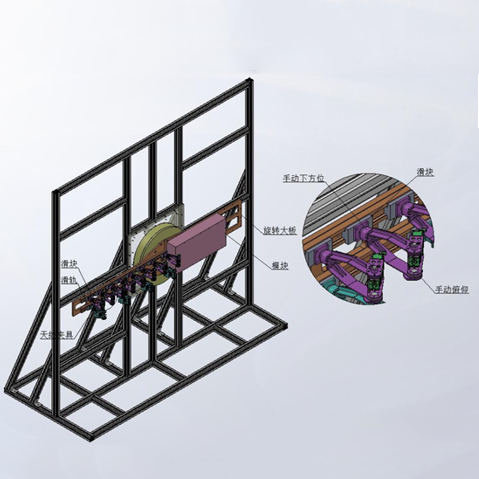
本运动机构主要包括下方位和上俯仰转台及其驱动控制单元

详情
本运动机构主要包括下方位和上俯仰转台及其驱动控制单元,方位机构上采用“电机+涡轮蜗杆减速机”来实现目标的旋转运动,俯仰采用“电机+蜗轮蜗杆减速机”来实现目标的上下运动,配置脉冲触发信号,俯仰带有电气限位装置。方位和俯仰采用了涡轮蜗杆,因此具备机械自锁能力。电子器件均采用高温防爆器件。

结构形式
下方位上俯仰型
运动范围
方位/俯仰均为-45°-45°
承重
≥360Kg
转台精度
≤0.5°
电动速度
0-2°/S
其它功能
支持复位、开始、点动控制;控制器与计算机通讯采用网口(可根据用户指定);带有限位,机械自锁。
相关